Husky¶

Hardware Overview¶
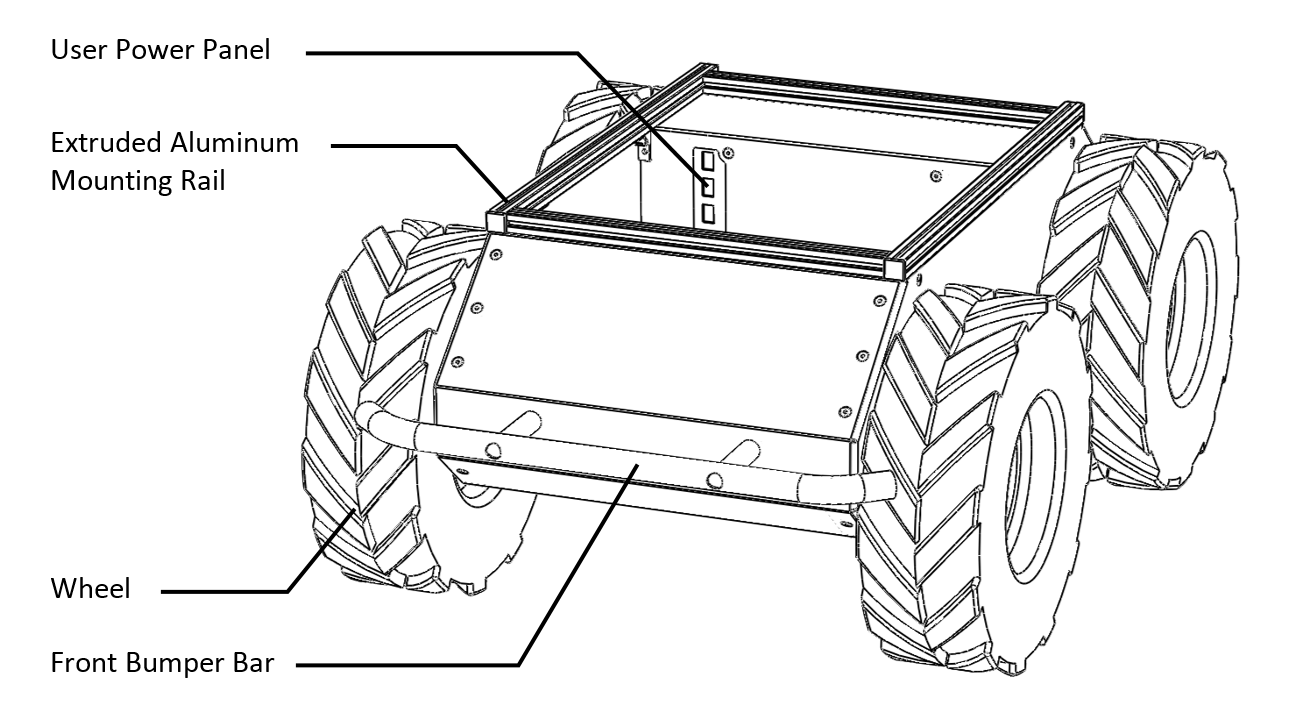
Husky front view
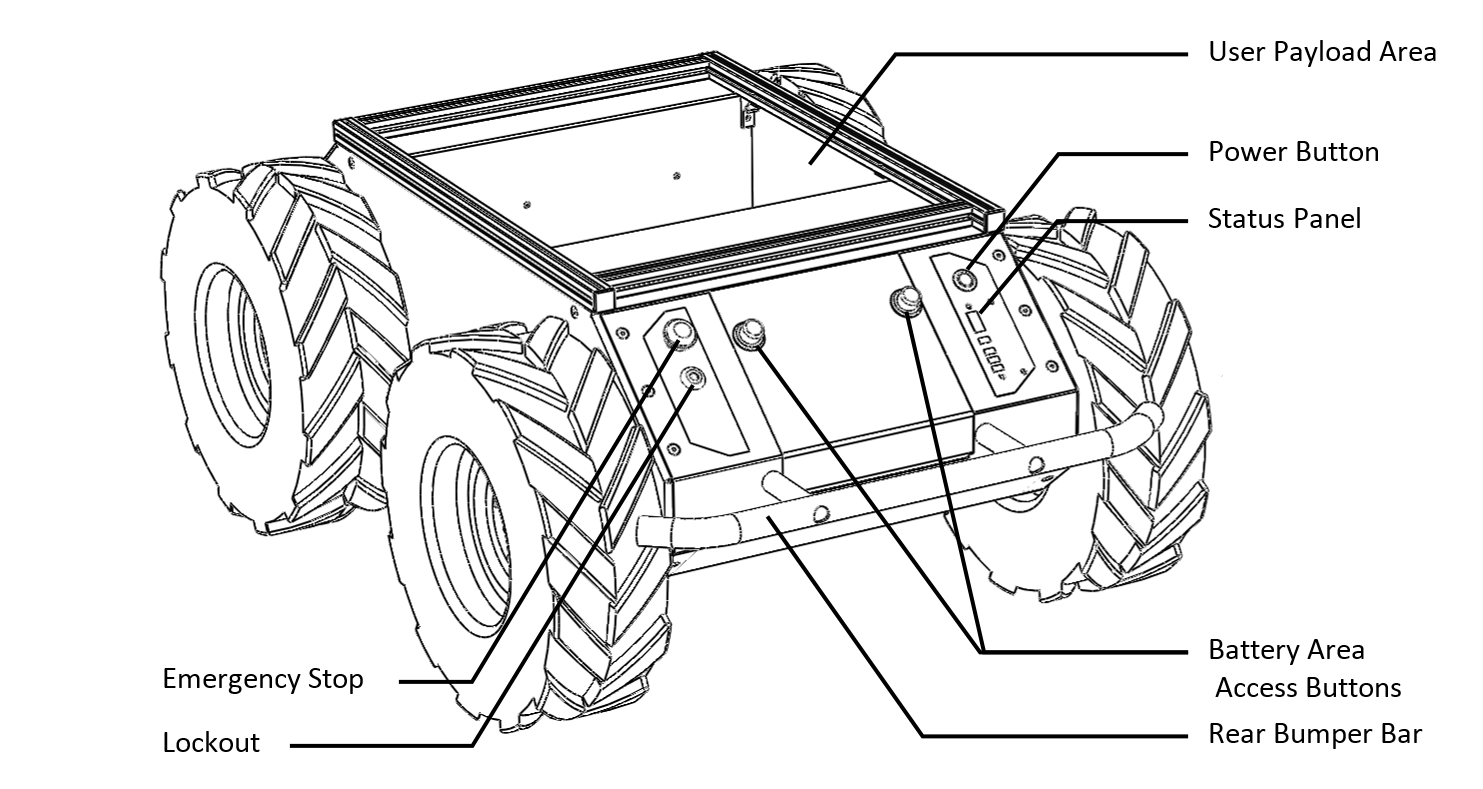
Husky rear view
Status Panel¶
상태 패널은 차체 후면에 위치한 LED 인디게이터로, 로봇의 현재 상태에 대한 정보를 제공합니다.
| Icon | Description |
|---|---|
 |
Battery status The four LED segments provide an approximate indication of the relative lifetime remaining in the battery. |
 |
Communication status When green, Husky is receiving a stream of correctly-formatted motion commands, and is ready to drive. When yellow, Husky is receiving commands, but will not drive due to emergency stop or another error. When red, serial communications are currently timed-out. |
 |
General error status Illuminates red when Husky will not drive due to an error state. Such states include emergency stop, insufficient battery power, or an unspecified software error. |
 |
Emergency stop status Illuminates red when Husky will not drive due to he emergency stop being activated, either onboard or wireless (if available). |
 |
Charge Indicator Illuminates red when Husky user power is being supplied externally. |
Orientation References¶
로봇의 기준 좌표계는 아래의 그림과 같이 ISO 8855를 기반으로 합니다. 로봇이 양의 선속도 값을 명령으로 받으면, 양의 X축 방향으로 이동합니다.
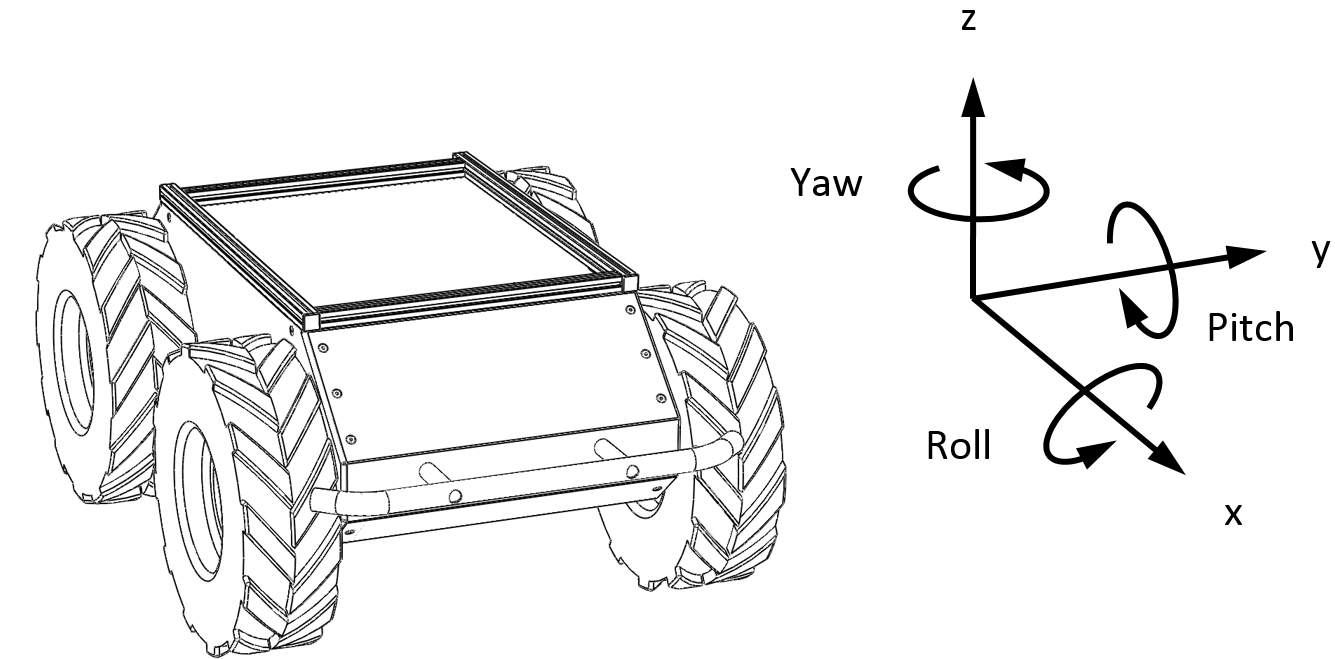
Huksy frame
Pinout Refrences¶
로봇은 호스트 장치와 통신하기 위해 DE-9 암 커넥터를 제공합니다. 커넥터의 핀 배치는 아래의 그림과 같습니다.
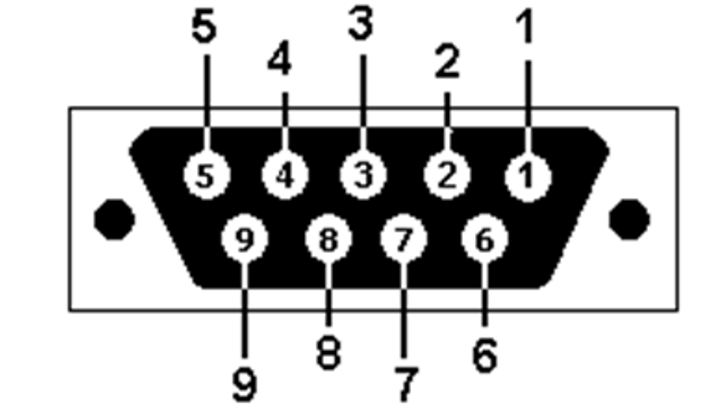
DE-9 pinout
| Pin | Name | Dir | Description |
|---|---|---|---|
| 2 | RX | IN | Data from Platform |
| 3 | TX | OUT | Data to Platform |
| 5 | GND | N/A | Common Ground |
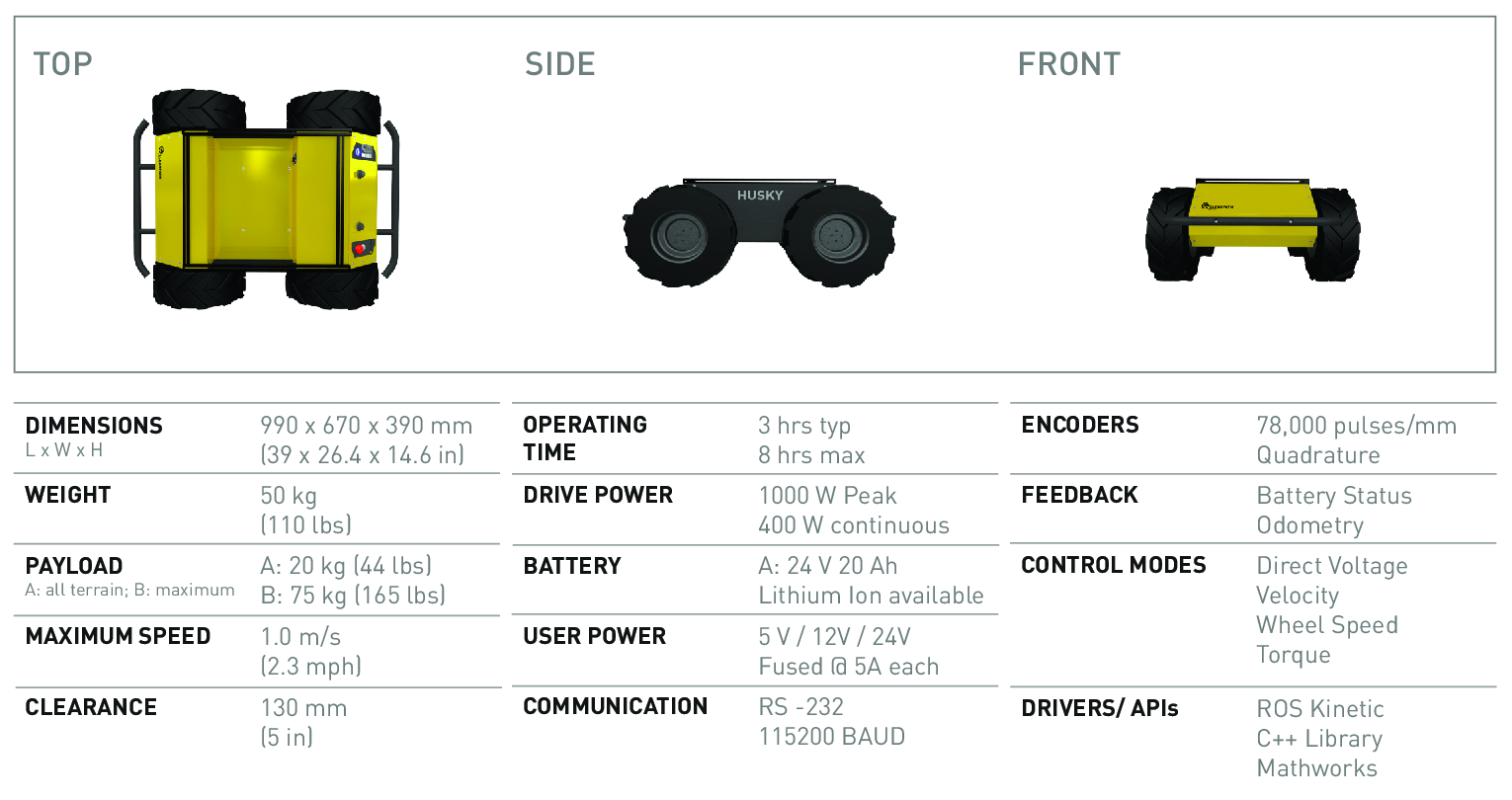
Product Dimensions¶
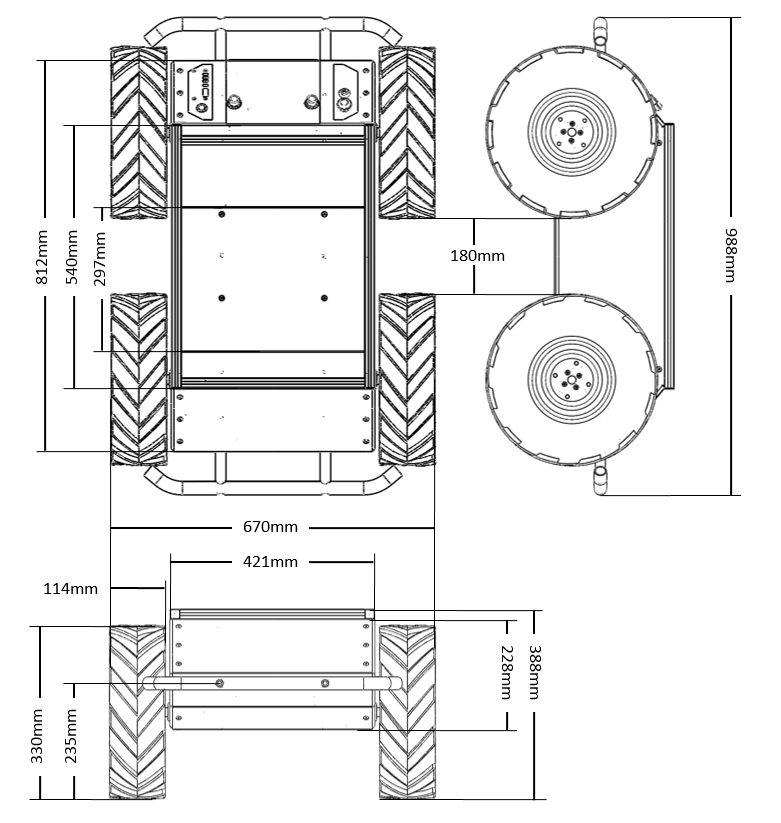
Husky dimensions
System Specifications¶
| Specifications | Values | |
|---|---|---|
| Dimensions | 990 mm length | 39 in length |
| 670 mm width | 26.4 in width | |
| 390 mm height | 14.6 in height | |
| Track | 555 mm | 21.9 in |
| Wheelbase | 512 mm | 20.2 in |
| Weight | 50 kg | 110 lbs |
| Maximum Payload [1] | 75 kg | 165 lbs |
| All-terrain Payload [2] | 20 kg | 44 lbs |
| Speed (max) | 1.0 m/s | 3.3 ft/s |
| Ground clearance | 130mm | 5 in |
| Climb grade | 45° | 100% slope |
| Traversal grade | 30° | 58% slope |
| Operating Ambient Temperature | -10 to 30 o C | 14 to 86 o F |
| Operating time | 3 hours typical | |
| 8 hours standby (no motion) | ||
| Battery | 24V 20Ah Sealed Lead Acid | |
| Battery charger | short-circuit, over-current | |
| reverse voltage protection | ||
| Charge time | 10 hours | |
| User Power | 5V / 12V / 24V Each fused at 5A | |
| Communication | RS-232 115200 Baud | |
| Wheel Encoders | 78,000 ticks/m | |
| Internal Sensing | Battery Status | |
| Wheel odometry | ||
| Motor currents | ||
| [1] | Continuous operation on relatively flat terrain with wide turns |
| [2] | Vehicle climbing 30° grade with high-mounted payload, or turning in place in high-friction conditions |
Safety¶
General Warnings¶
- Husky는 견고하고 고성능의 UGV입니다. 본인과 타인의 안전을 위하여 로봇을 지면에서 띄운 다음에, 초기 테스트와 소프트웨어 개발을 수행하십시오.
- 시작할 때는 휠 속도를 낮추십시오. 로봇의 제어 루프는 0.1 m/s의 낮은 속도를 정확하게 유지할 수 있습니다.
- 로봇이 구동 중일 때는 로봇의 전면과 후면에 설치된 범퍼를 주의하십시오.
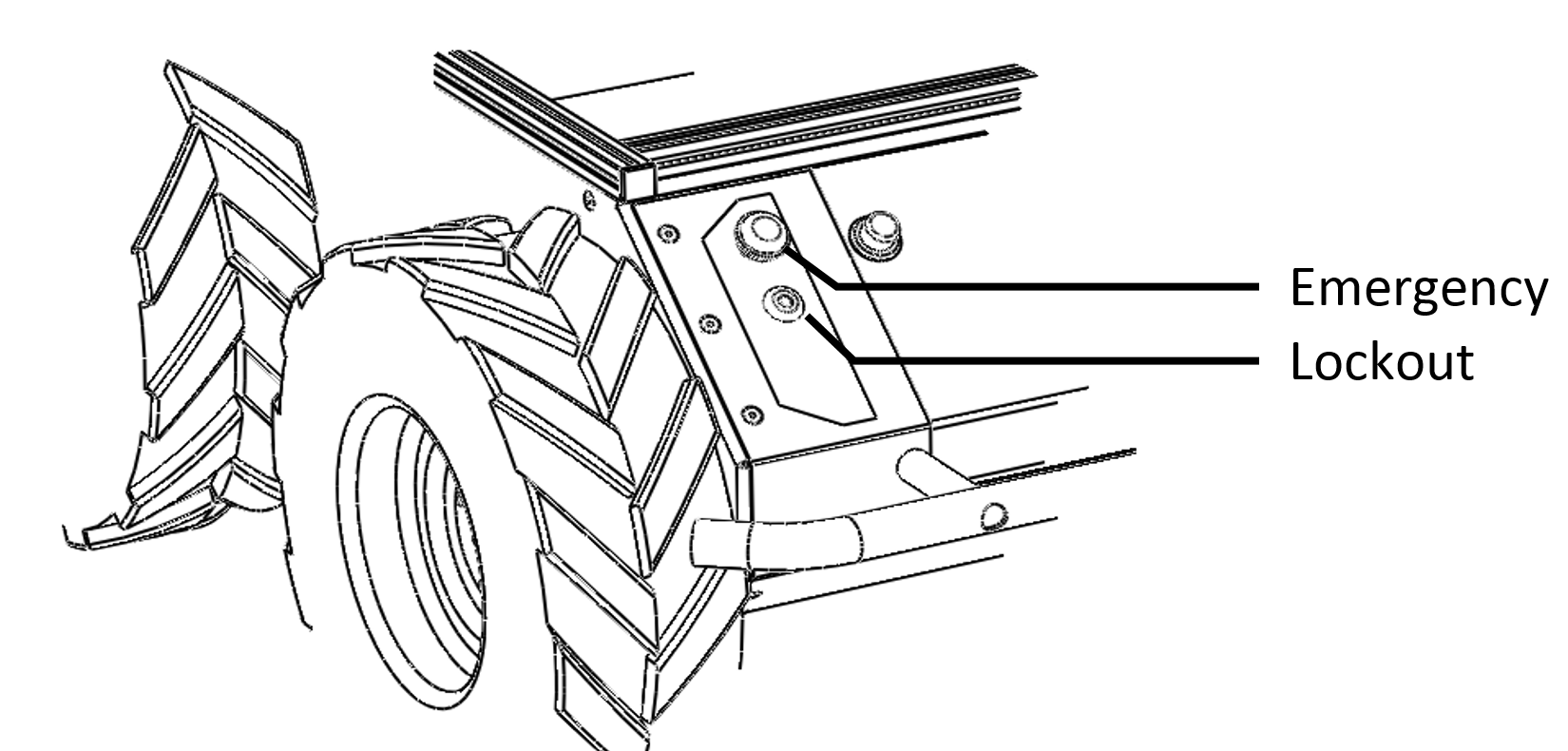
E-Stop and Lockout¶
빨간색 비상 정지 버튼(E-Stop)와 잠금장치는 아래의 그림과 같이 로봇 후면에 있습니다. 로봇 모터 드라이버의 전원 공급 장치는 비상 정지 버튼와 연결된 릴레이와 연결되어 있습니다. 비상 정지 상태면 상태 패널의 비상 정지 표시기가 빨간색으로 켜지고, 로봇은 움직이지 않습니다. 비상 정지 상태가 해제되기 전에 명령이 중지되면 로봇은 움직이지 않습니다. 그러나 명령이 계속 전송되고 있으면, 비상 정지 상태가 해제될 때 로봇이 바로 구동될 수 있습니다.
항상 비상 정지 버튼에 접근할 수 있는지 확인하십시오. 로봇 상판에 물건을 탑재할 때 비상 정비 버튼을 막지 않도록 주의하십시오.
잠금장치 역시 로봇이 움직이지 못하도록 합니다. 잠금 상태일 때는 로봇의 전원이 켜져 있지만 모터는 구동되지 않습니다.
Estop and lockout
Electrical System¶
로봇은 전동 휠체어, 골프 카트 등에서 사용되는 24V 납산 배터리 1개로 구동됩니다. 로봇 배터리는 1800W를 공급할 수 있으며, 이로 인해 로봇의 모터는 뛰어난 성능을 발휘할 수 있습니다. 그러나 상해를 입힐 수도 있으므로 다음 주의사항을 준수하십시오.
- 배터리에 연결된 플러그를 함부로 조작하지 마십시오.
- 퓨즈를 확인 및 교체하고, 배터리 플러그를 연결 및 분리하는 것 외에는 퓨즈 패널을 함부로 조작하지 마십시오.
- 배터리 커버를 장착하지 않은 상태로 로봇을 구동하지 마십시오. 커버가 없으면 배터리가 제자리에 고정되지 않으므로 퓨즈 패널이 손상될 위험이 있습니다.
- 당사에서 제공하는 충전기로만 배터리를 충전하십시오.
- 배터리를 올바르게 폐기하십시오.
Lifting and Transport¶
로봇을 수동으로 운반할 때, 사용자의 안전과 로봇의 수명을 보장하려면 다음 사항을 준수하십시오.
- 두 사람이 로봇의 앞뒤 범퍼를 잡아 들어 올려야 합니다. 배터리를 제거하면 로봇의 무게를 줄일 수 있습니다.
- 단거리 운송 시에는 E-Stop 버튼을 이용하고, 장거리 운송 시에는 전원이 꺼졌는지 확인하십시오.
- 모터가 손상될 수 있으므로 로봇을 수동으로 밀지 않는 것이 좋습니다.
Performance Recommendations¶
로봇에는 소프트웨어 점검을 위한 인터페이스가 있습니다. /status 및 /diagnostics rostopic은
전압, 전류, 온도 및 시스템의 일반적인 상태에 관한 정보를 제공합니다.
총 전류 소모량에는 모터 드라이버가 포함되어 있지 않고, MCU와 사용자 전원 단자에서 소비하는 전류만 포함됩니다. 로봇의 모터의 전류 소모량은 약 8A 입니다. 그러나 거친 지형에서 구동할 때는 전류가 급상승합니다. 전류 소모를 줄이려면 로봇을 더 넓은 반경으로 회전하도록 제어하십시오.
온도는 모터 드라이버와 모터 케이스에서 측정됩니다. 시스템의 제한 온도는 50C° 입니다. 제한 온도에 도달하면 시스템은 종료됩니다.
Getting Started¶
Remote ROS Connectivity¶
ROS 인터페이스를 사용하기 위해서는, 원격 PC가 로봇의 ROS 마스터와 연결되어야 합니다.
이를 통해 원격 PC에서 rostopic list, rostopic echo, rosnode list 와 같은 ROS
명령을 실행할 수 있습니다.
이를 위한 ROS 네트워크 설정 방법은 아래와 같습니다.
bashrc 스크립트 파일에서
ROS_MASTER_URI,ROS_HOSTNAME환경 변수를 설정하십시오.$ vim ~/.bashrc
# Add the following lines export ROS_MASTER_URI=http://<ROBOT_IP>:11311 export ROS_HOSTNAME=<REMOTE_IP>
<ROBOT_IP>는 로봇 PC의 IP 주소이고,<REMOTE_IP>는 원격 PC의 IP 주소입니다.Hostname과 IP 주소를 매핑하기 위하여
/etc/hosts파일에 아래의 내용을 추가하십시오.$ sudo vim ~/.bashrc # Add the following line <ROBOT_IP> <ROBOT_HOSTNAME><ROBOT_IP>는 로봇 PC의 IP 주소이고,<ROBOT_HOSTNAME>는 로봇 PC의 Hostname 입니다. 일반적으로 Hostname은 로봇의 시리얼 넘버로 설정되어 있습니다.Tip
Hostname은
hostname명령을 터미널 창에 입력해서 확인할 수 있습니다.
Connecting Power¶
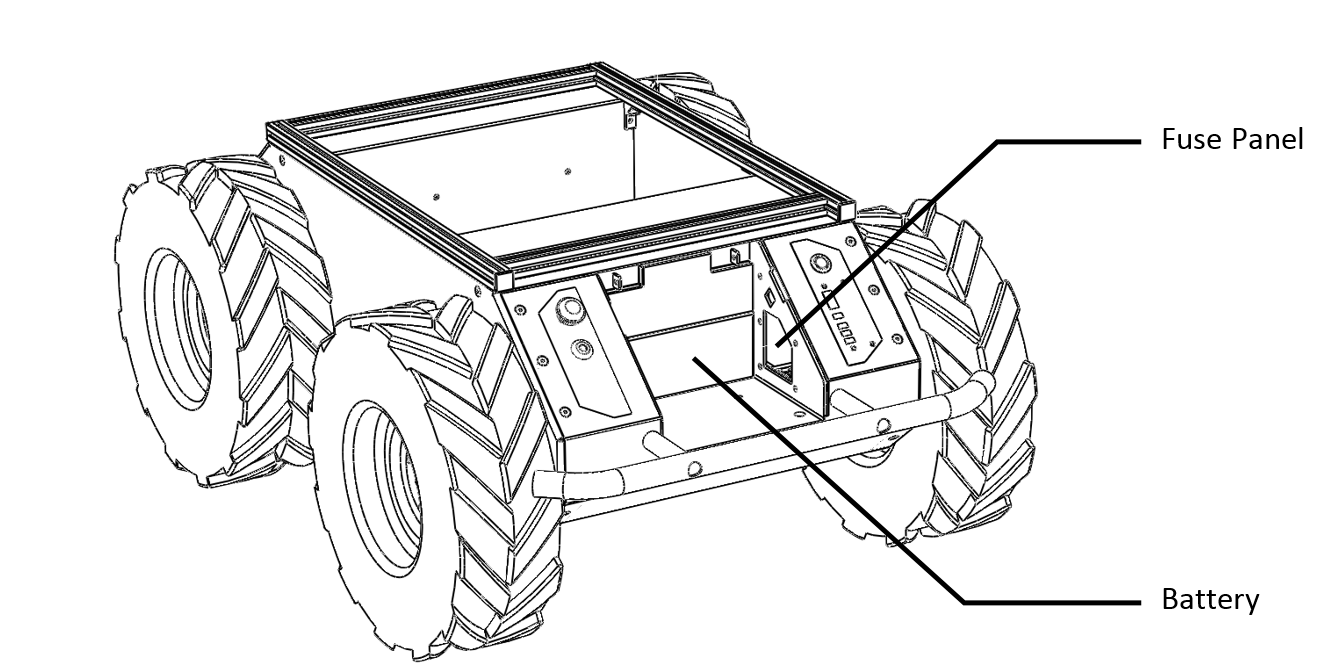
로봇의 배터리는 완전히 충전된 상태로 설치되어 있지만, 안전을 위해 운송 중에는 분리되어 있습니다. 배터리를 다시 연결하는 방법은 아래와 같습니다.
- 로봇의 주전원 버튼이 OFF 위치에 있고, 비상 정지가 활성화되어 있는지 확인하십시오.
- 배터리 커버의 래치 버튼을 누르면서 커버를 분리하십시오.
- 배터리 플러그를 퓨즈 패널의 커넥터에 연결하십시오. 딸각 소리가 날 때까지 밀어 넣어 단단히 고정하십시오.
- 배터리 커버를 제자리에 장착하십시오.
Husky battery area
로봇의 전원을 켜려면 상태 패널 위에 있는 전원 버튼을 누르십시오. 전원 버튼을 누르면 파란색 LED가 표시됩니다. PC와 로봇이 통신하게 되면 통신 상태 표시등이 초록색으로 바뀝니다. 비상 정지 버튼을 누르면 정지 상태 표시등이 빨간색으로 표시됩니다.
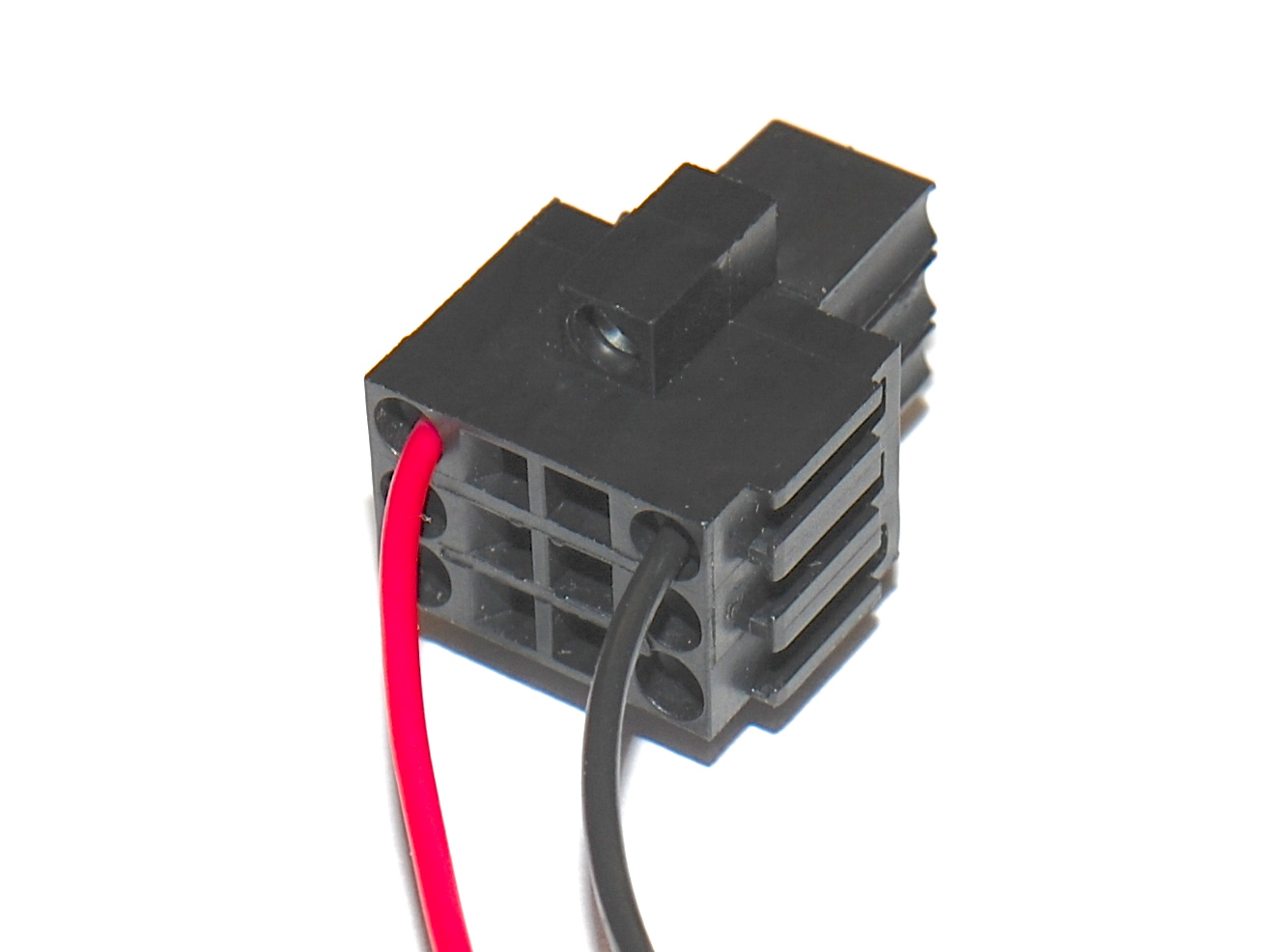
User Bay Power Connections¶
사용자 전원 단자는 최대 5A의 5V, 12V 및 24V 를 제공합니다. 각 터미널에는 탈부착식 커넥터가 장착되어 있습니다. 2mm 폭의 일자 드라이버를 사각형 구멍에 삽입하면, 바로 옆에 있는 둥근 구멍이 열립니다. 이 둥근 구멍에 전선을 밀어 넣고, 드라이버를 제거하면 전선이 고정됩니다.
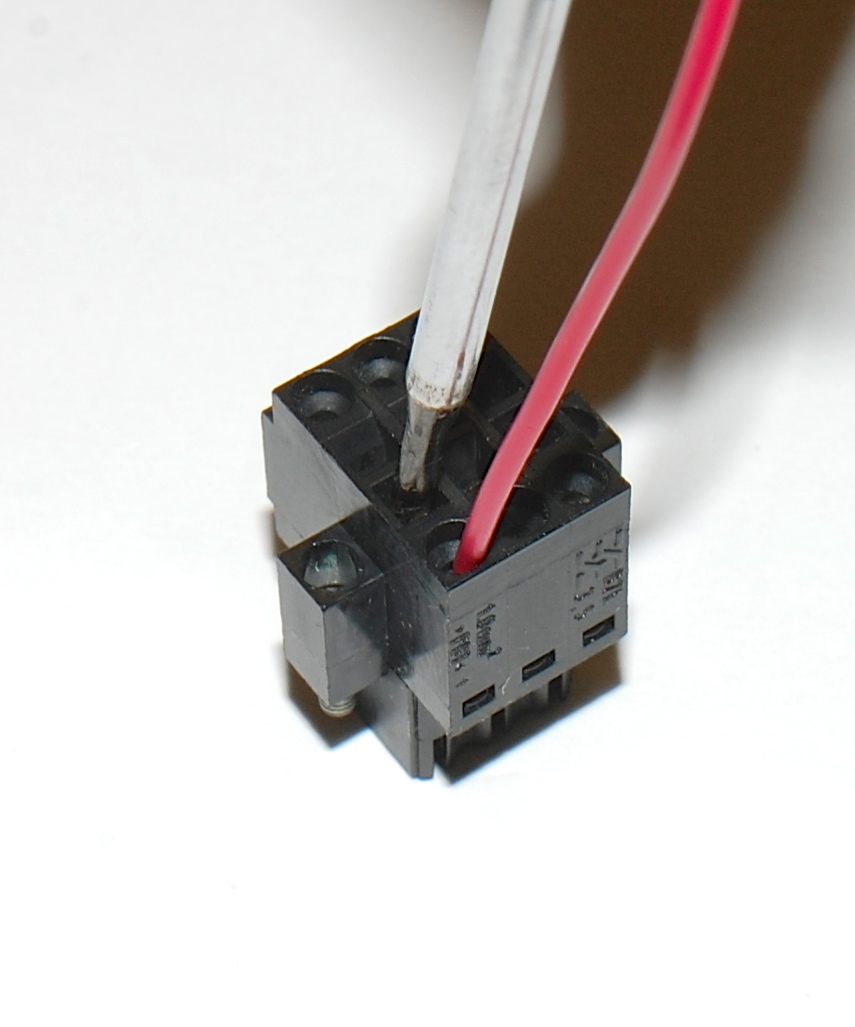
Warning
사용자 전원 단자를 사용할 때, 극성이 올바른지 확인하십시오. 그리고 최대 전류(5A)를 초과하지 마십시오.
Using ROS¶
Nodes¶
rosnode list 명령어를 사용하면 로봇에서 실행중인 모든 노드들을 확인할 수 있습니다.
기본적으로 실행되는 노드들은 아래와 같습니다.
| Node | Description |
|---|---|
/husky_node |
Provides control and communication between the Husky platform and ROS.
Accepts velocity commands and provides system feedback on /status |
/robot_state_publisher |
Subscribes to /joint_states and publishes the robot’s state to tf |
/bluetooth_teleop |
Publishes velocity commands from a joystick to /twist_mux |
/twist_mux |
Takes in multiple sources of velocity commands, and prioritizes what actually gets sent to the controller |
/ekf_localization |
Part of the robot localization package, more information regarding this package can be found at http://wiki.ros.org/robot_localization |
Topics¶
rostopic list 명령어를 사용하면 로봇에서 활성화되어 있는 토픽들을 확인할 수 있습니다.
기본적으로 활성화되어 있는 노드들은 아래와 같습니다.
| Topic | Message type | Description |
|---|---|---|
/bluetooth_teleop/joy |
sensor_msgs/Joy |
Receives joystick commands, echo this topic to verify your controller is publishing |
/tf |
tf2_msgs/TFMessage |
Transforms between coordinate frames, this should always be publishing, and hence a good topic to echo to test your ROS connection |
/status |
husky_msgs/HuskyStatus |
Displays system status information |
/estop |
std_msgs/Bool |
Displays the estop status |
/odometry/filtered |
nav_msgs/Odometry |
The odometry estimate of the robot from
/ekf_localization |
| Motion Topics | twist_mux Priority |
Description |
|---|---|---|
husky_velocity_controller/cmd_vel |
Receives motion commands from
twist_mux based off their priority |
|
joy_teleop/cmd_vel |
10 | Joystick teleop input |
twist_marker_server/cmd_vel |
8 | Interactive marker teleop input |
move_base/cmd_vel |
2 | Autonomous movement input, for the husky navigation packages |
cmd_vel |
1 | Miscellaneous external input |
Battery and Maintenance¶
Husky는 장기간 사용할 수 있도록 견고하게 제작되었습니다. 다음 사항들은 로봇의 수명을 연장할 수 있는 유지보수에 관한 사항들입니다.
Charging¶
Important
로봇과 함께 제공되는 배터리를 충전하기 위해서는 배터리를 로봇에서 분리해야 합니다.
- 충전기의 DC 출력 단자를 배터리의 단자와 연결하십시오.
- 충전기의 전원 코드를 콘센트와 연결하십시오.
- 충전기의 LED가 켜집니다.
- 배터리가 완전히 충전되면 충전기의 LED가 초록색으로 표시됩니다.
- 충전기의 전원 코드를 분리한 다음에, 배터리와의 연결을 분리하십시오.
Battery Care¶
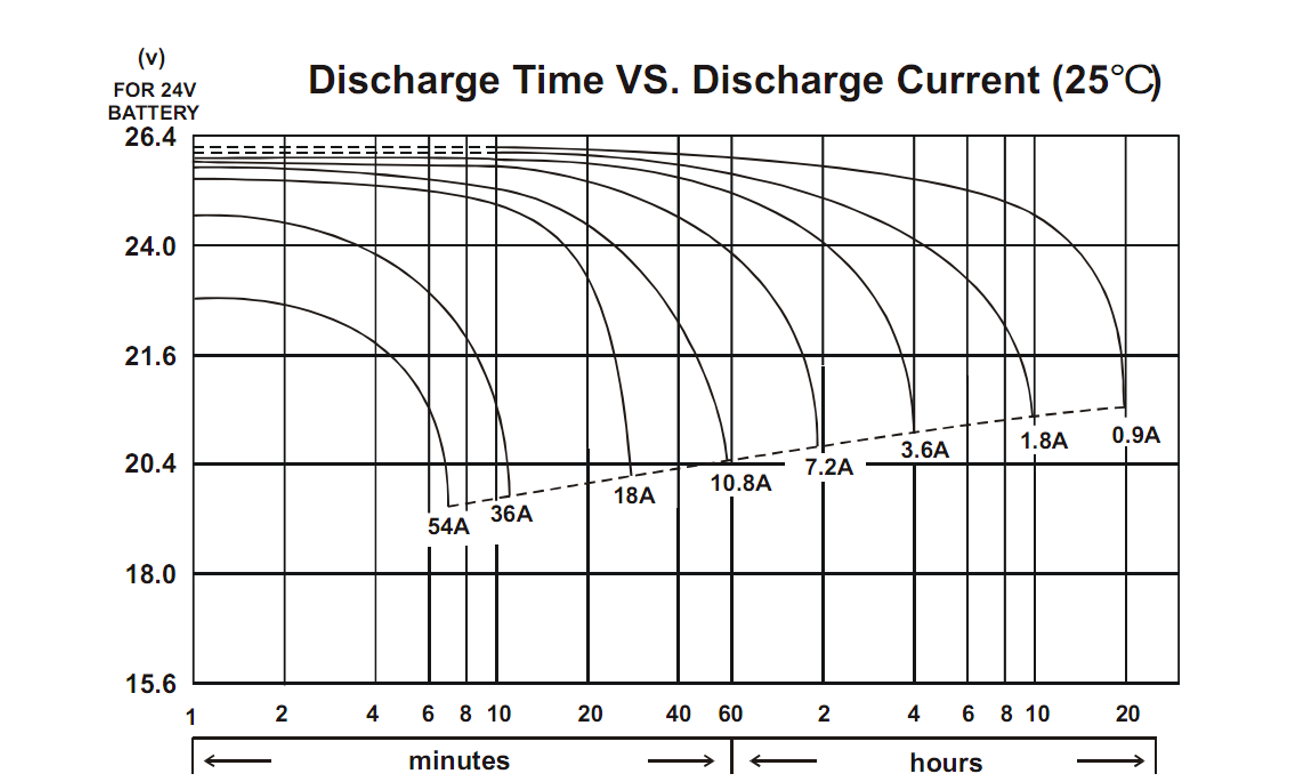
로봇은 24V 납산 배터리(lead–acid battery)를 사용합니다. 납산 배터리에 가장 치명적인 것은 황화 현상입니다. 납산 배터리를 장시간동안 충전되지 않은 상태로 두면, 배터리의 전극에서 황산 결정이 응고됩니다. 이 효과는 영구적으로 배터리의 용량을 감소시킵니다. 따라서 남은 용량에 상관없이 배터리 사용을 마치자마자 충전하는 것이 중요합니다. 배터리 충전은 3단계(Constant current, topping charge, float charge)로 이루어집니다. 첫번째 단계에서 배터리 용량의 대부분(70%)이 충전됩니다.
Charging chart
다음 사항은 배터리의 수명을 최대화할 수 있는 사항입니다.
- 배터리 사용을 마치면 항상 완전히 충전하십시오.
- 실온에서 배터리를 충전하십시오. 섭씨 35도 이상의 온도에서 납산 배터리를 충전하지 마십시오.
- 통풍이 잘되는 장소에서 배터리를 충전하십시오.
- 배터리가 얼지 않도록 주의하십시오.
- 보관 중인 배터리는 매달 충전시켜야 합니다. 4~6개월마다 배터리를 완전히 충전하십시오.
- 방전율 50이 되는 시점이 지나면 용량이 줄어듭니다.
Wheels¶
타이어의 압력은 온도에 따라 변할 수 있으며, 압력계를 사용하여 주기적으로 점검해야 합니다. 타이어의 압력은 20psi를 초과하지 않아야 하며, 지형에 따라 더 낮은 압력이 필요할 수 있습니다. 타이어를 분리해야하는 경우에는, 먼저 휠을 차축 허브에 연결하는 M5 육각 렌치 볼트 4개를 풀어야 합니다. 타이어를 교체할 때는 나사를 3.7 ft-lb [5 N-m] 토크로 조여야 합니다.
Chassis¶
기본 옵션의 Husky은 방수 기능이 없습니다. 차체가 물에 잠기지 않도록 주의해야 합니다. 차체에 물이 들어간다면, 배터리를 제거하고 최소 24시간동안 완전히 건조시켜야 합니다.