ROS Basic¶
What is ROS?¶

ROS (Robot Operating System)는 로봇의 구성 요소를 제어하기 위한 기능들을 제공하는 오픈 소스 기반의 시스템입니다. ROS 시스템은 노드(Node)라 불리는 분산된 프로세스로 구성되며, 이 노드는 다른 노드와 메세지를 통해 데이터를 주고받을 수 있습니다.
Why ROS?¶
ROS는 로봇 관련 다양한 라이브러리 및 패키지와 유용한 개발도구를 제공합니다. 이를 이용하여 개발 시간과 노력을 단축할 수 있기 때문에 많은 분야에서 사용되고 있습니다.
ROS의 대표적인 특징은 아래와 같습니다.
분산 프로세스
- 각 노드는 독립적으로 실행되고, 유기적으로 데이터를 주고받을 수 있습니다.
이기종 하드웨어 간의 데이터 송수신
- 메세지 통신만 가능하다면, 운영체제와 프로그래밍 언어에 상관없이 메시지를 통해 데이터를 주고받을 수 있습니다.
다양한 개발 도구 제공
- 시각화된 로봇의 외형과 동작 표현 및 센서 데이터를 확인할 수 있는 RViz
- 그래프화된 노드, 토픽의 연결 정보 및 센서 데이터를 확인할 수 있고, GUI 개발을 위한 Qt 기반의 프레임 워크를 제공하는 rqt
- 물리엔진을 탑재하여 3차원 시뮬레이션을 지원하는 Gazebo
로봇 관련 다양한 기능 제공
- 다양한 센서 드라이버
- 로봇 관련 라이브러리 제공 (Geometry, Kinemetic, Reverse Kinemetic 등)
- 주변을 감지하며 현재 위치를 추종 및 지도를 제작할 수 있는 SLAM
- 지도 내에서 장애물을 회피하며 최적의 경로로 목적지를 찾아가는 Navigation
- 매니퓰레이터(ManiPulator) 라이브러리와 GUI 형태의 도구를 제공하는 MoveIt!
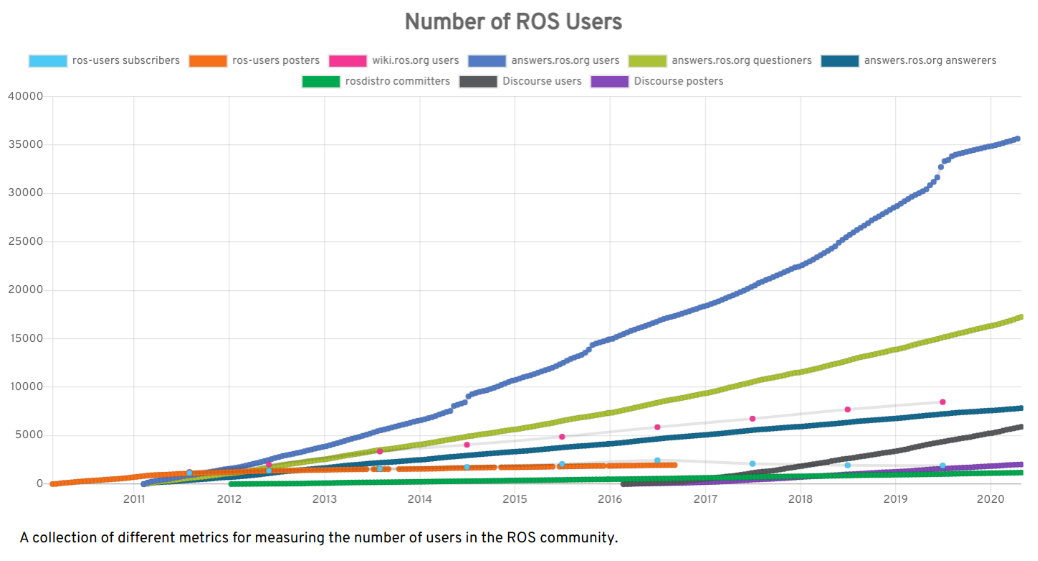
ROS 커뮤니티 사이트의 연도별 사용자 수 (metrics.ros.org)
Before Start¶
ROS는 Ubuntu, Linux Mint, Windows, Mac OS 등과 같은 운영체제에서 지원되고 있습니다. 하지만 우분투 LTS 버전과 개발주기를 맞추는 ROS의 Release 정책을 고려했을 때, 호환성과 안정성이 높은 우분투 LTS 버전과 그에 맞는 ROS 버전을 추천합니다.
Installing Ubuntu and ROS¶
Ubuntu와 ROS 설치 방법은 아래의 링크를 참고하십시오.
Configuring Environment¶
ROS를 사용하기 위해서 필요한 환경 설정 들은 아래와 같습니다.
Create ROS Workspace
catkin 은 ROS의 공식 빌드 시스템입니다. 사용자는 이를 사용하여 직접 프로젝트를 빌드할 수 있습니다. catkin을 사용하기 위해 아래와 같이 작업 공간을 설정하십시오.
$ mkdir -p ~/catkin_ws/src $ cd ~/catkin_ws/src $ catkin_init_workspace $ cd ~/catkin_ws/ $ catkin_make
Environment setup
ROS를 사용하기 위해서는
source명령어를 이용하여 환경 설정 파일을 불러와야 합니다. 터미널 창을 새로 열 때마다 자동으로 환경 설정 파일을 불러올 수 있도록.bashrc파일을 수정하십시오.$ vim ~/.bashrc
자동으로 ROS의 환경 설정 파일과 catkin 작업 공간의 환경 설정 파일을 불러올 수 있도록
.bashrc파일에 아래의 내용을 추가하십시오.source /opt/ros/melodic/setup.bash source ~/catkin_ws/devel/setup.bash
ROS network setup
ROS는 분산 컴퓨팅 환경을 제공합니다. 네트워크 구성을 통해서 Master와 다수의 Host의 연결이 가능합니다. 이를 위한 네트워크 설정 방법은 아래와 같습니다.
- bashrc 스크립트 파일에서
ROS_MASTER_URI,ROS_HOSTNAME환경 변수를 설정하십시오.
$ vim ~/.bashrc # Add the following lines export ROS_MASTER_URI=http://<MASTER_IP>>:11311 export ROS_HOSTNAME=<REMOTE_IP>
- Hostname과 IP 주소를 매핑하기 위하여
/etc/hosts파일에 아래의 내용을 추가합니다.
$ sudo vim ~/.bashrc # Add the following line <MASTER_IP> <ROBOT_HOSTNAME>Tip
Hostname은
hostname명령을 터미널 창에 입력해서 확인할 수 있습니다.- bashrc 스크립트 파일에서